Poisson Disk Sampling with Randomized Satellite Points for Projected Texture Stereo
Project page of the paper “Poisson Disk Sampling with Randomized Satellite Points for Projected Texture Stereo”.
Paper
Citation
J. Takeda and N. Fukushima, “Poisson Disk Sampling with Randomized Satellite Points for Projected Texture Stereo,” Optics Continuum, vol.1, no.5, pp.974-988, May 2022.
BibTeX
@article{takeda2022poisson,
author = {Jun Takeda and Norishige Fukushima},
title = {Poisson Disk Sampling with Randomized Satellite Points for Projected Texture Stereo},
journal = {Opt. Continuum},
volume = {1},
number = {5},
pages = {974--988},
month = {May},
year = {2022},
publisher = {OSA},
doi = {10.1364/OPTCON.451197},
}
Compile
The codes are written in C++. The library is only tested in Windows with Visual Studio.
The dependency is OpenCV and our library of OpenCP. For compiling the OpenCP library, Qt maybe required. Pre-compiled OpenCP libraries are attached in OpenCP dir.
The project use the following system environment variable as Macro; please set your environment variables according to your environment or write the path directly in the sln project file. The examples are as follows;
OPENCV_INCLUDE_DIR = "C:\OpenCV\include"
OPENCP_INCLUDE_DIR = "C:\OpenCP\include"
OPENCV_LIB_DIR = "C:\OpenCV\lib"
OPENCP_LIB_DIR = "C:\OpenCP\lib"
Also, OpenCP.dll must be located in the active pass. For example,
PATH = "C:\OpenCP\bin"
Usage
In main.cpp, we can switch the following functions. The main simulation code is stereoTest.
stereoTest();//test for stereo matching
pointcloudTest();//test for point cloud rendering for Fig. 12
//generatePDSMask(Size(1400, 1120), 2.f, 10);// function to prepare PDS masks for stereo test.
For stereoTest, we can change the following conditions;
- images (27 images from Middlebury dataset 2005 and 2006)
- projection pattern and density (proposed, random, Poisson disk sampling (PDS), no projection)
- matching method (SAD, SSD, census, etc.)
The processing flow is as follows;
- load stereo images and disparity maps,
- compute min/max search range
- generate the center disparity map for projection
- add noise (optional)
- call the method of
guiinclass StereoMatch,which is the main stereo matching function.
The overview of the function call is shown in the following figure.
We have 7 windows; disparity map, projection, parameters, cost function, profile, console information, and point cloud (optional).
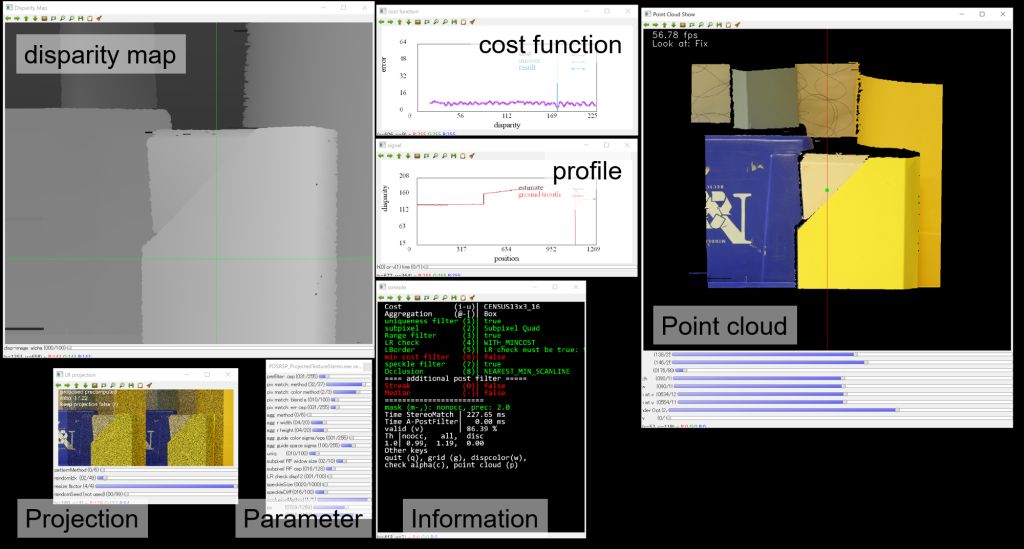
Each window and keyboard shortcut can change the parameters.
- In the disparity map window, we can change the RGB alpha blending ratio between an RGB image and a disparity map by “disp-image” trackbar. Also, mouse-clicking over the window changes the position of the cost function and profile plots.
- In the profile window, the trackbar “H(0) or V(1) line” switches the horizontal or vertical signal profile plot.
- In the projection window, we can change the projection pattern and density.
-
“patternMethod trackbar” changes the projection methods:
- proposed (precomputed)
- random (precomputed)
- PDS (precomputed)
- no mask
- proposed (on the fly)
- random (on the fly)
- PDS (on the fly)
- “randomIdx trackbar” changes the density of the on the fly projection (5-7).
- “resize factor trackbar” change the size of this window.
- if we press
rkey, you can toggle the update of the random seed or not. - “randomSeed(not used) trackbar” is not work in the default setting; please prepare the other random mask by using the
generatePDSMaskfunction.
-
- Parameters for stereo matching can be changed in the keyboard shortcuts listed in the information window or the trackbars in the parameter window.
- “prefilter cap” is for truncating the Sobel filtering response for Sobel SAD/SSD matching
- “pix match: method” or keyboard shortcut(i-u) can change the cost functions: SAD, SSD, edge-SAD, census, etc.
- “pix match: blend a” only work for xxxBlend cost function, which blends image-based cost (e.g.m SAD) and edge-based cost (e.g., Sobel-SAD)
- “pix match: err cap” truncate the pixel matching cost excepting census transformation.
- “agg method” or keyboard shortcut(@-[) can change the aggregation method for cost function; however, box aggregation is the almost best in the projection case.
- agg r width/height can change the horizontal or vertical size of the aggregation window.
- “agg guide color sigma/eps”/”agg guide space sigma” control the parameter for edge-preserving aggregation; however, compared to the no-projection case, edge-preserving aggregation does not work effectively because the projection pattern disturbs the matching.
- “uniq” controls the uniqueness filter, which invalidates the nonunique matching in the cost function. key (1) toggle able/disable the filter.
- “subpixel RF window size” control the window size of the post-filtering for disparity map, bilateral filter-like filter, which has binary weight in range kernel, and flat weight for spatial kernel.
- “subpixel RF cap” is the threshold value for the post-filtering
- key shortcut (2) changes the subpixel estimation methods and (3) disables the post-filter.
- “LR check disp12” is the parameter for single image LR-check for invalidating the disparity map.
- key shortcut (4) change the LR-check method
- key shortcut(5) replicate left boundary to stabilize the most left occluding areas.
- “speckleSize/Diff” change the post-filter of speckle filtering used in OpenCV and key (7) toggle the able/disable the filter
- key(8) or occlusion method toggles filling occlusion areas or not.
- px and py is the focusing pixel.
- (0) or (-) keys are the additional post filters
- For the point cloud window, press
pkey for calling the window. If we pressqkey after calling, the window is closed.
Patent
The matching method of the skipped census transform and the projection method of Poisson disk sampling with randomized satellite points are patent pending.